3-DoF Delta Robot
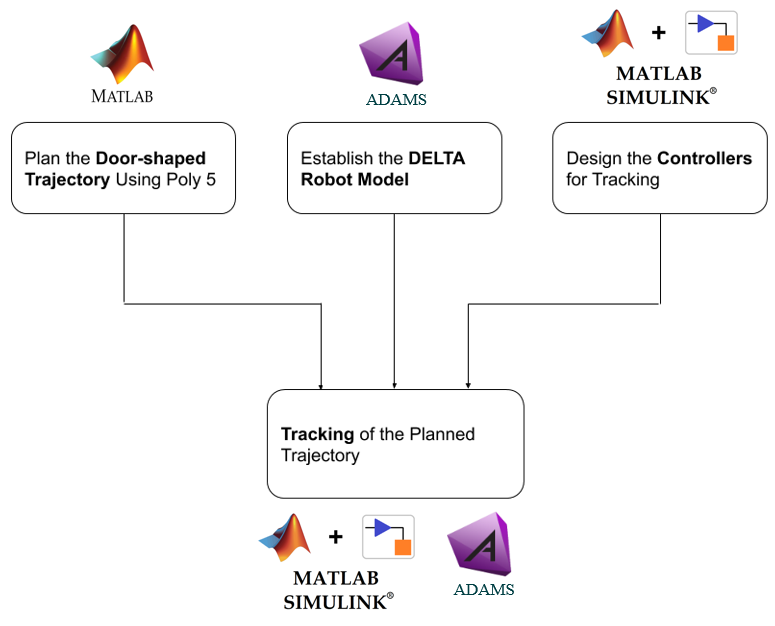
This is our final project of the course ME331: Robot Modeling & Control at Southern University of Science and Technology(SUSTech). 3-DoF delta robot is a kind of robot that is pervalently used in garbage sorting automation, and it is crucial for the robot to traverse a certain trajectory to reach the target. In this project, we mainly focus on trajectory planning and tracking of the 3-DoF parallel delta robot. 5-order polynomial is used to plan trajectory, and four different control strategies are applied to track the trajectory: independent PID control without feedforward, independent PID control with feedforward, computed torque control and nonlinear feedback control. Under the four strategies, the trakced trajetories are all quite close to the planned trajectory, serving as validations for the strategies.