
向沿臻
Yanzhen (Nelson) Xiang
About Me
Hi! My name is Yanzhen (Nelson) Xiang, a second-year Master student at D-MAVT, ETH Zürich, studying in the
Robotics, Systems and Control program. I graduated from Southern
University of Science and Technology (SUSTech) with a Bachelor of Engineering degree in Robotics Engineering in 2022, and my advisor was
Prof. Chenglong Fu. During the spring of 2022,
I studied as an exchange student at EECS, UC Berkeley and researched at the
Hybrid Robotics Lab, advised by
Prof. Koushil Sreenath. My current research interests
lie at the intersection of reinforcement learning, probabilistic planning, and optimal control, with their applications to robotics
systems. Aside from robotics, I am a lover of reading and playing badminton.
Please feel free to reach out to me via: xyz000327@gmail.com if there's anything interesting to you.
Publications
Accepted
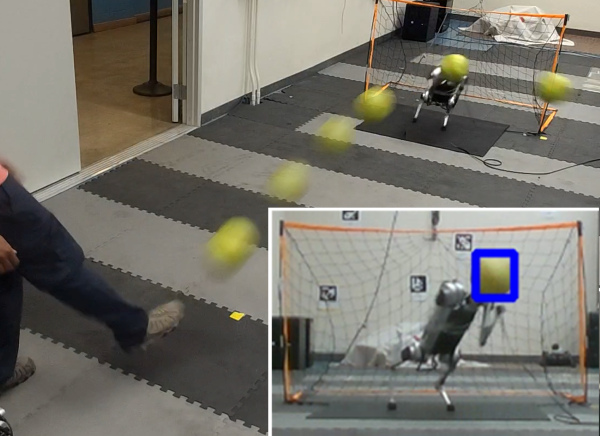
Creating a Dynamic Quadrupedal Robotic Goalkeeper with Reinforcement Learning, Xiaoyu Huang, Zhongyu Li, Yanzhen Xiang, Yiming Ni, Yufeng Chi, Yunhao Li, Lizhi Yang, Xue Bin Peng and Koushil Sreenath. (pdf)
Published
Powered Super Tail: A Terrain-Adaptive Wheel-legged Robotic Limb to Assist Human’s Load Carriage, Yanzhen Xiang, Xiaoyu Yan, Hanqi Su, Nuo Chen, Shangkun Guo, Jielin Wu, Yuquan Leng and Chenglong Fu. (M2VIP 2021) (pdf)
Wheel-Legged Robotic Limb to Assist Human With Load Carriage: An Application For Environmental Disinfection During COVID-19, Yuquan Leng, Xin Lin, Guan Huang, Ming Hao, Jing Wu, Yanzhen Xiang, Kuangen Zhang and Chenglong Fu. (IEEE RA-L) (pdf)
Projects
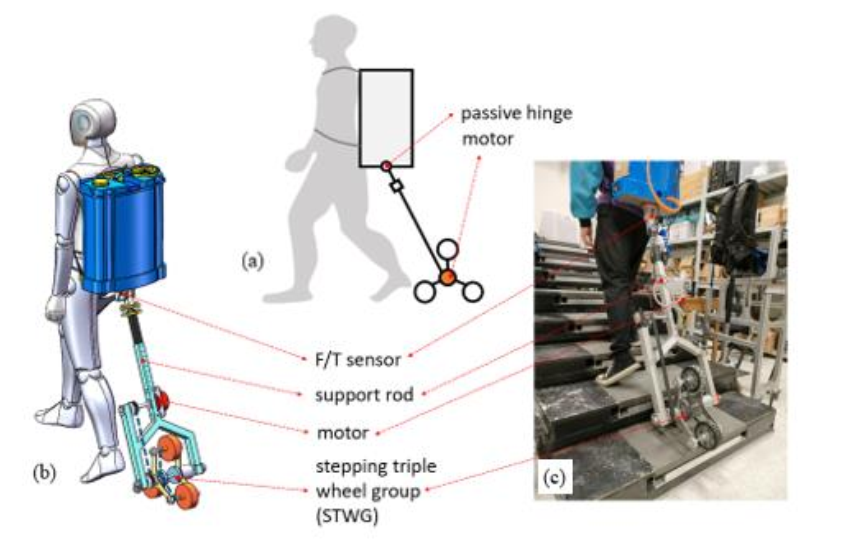
Powered Super Tail
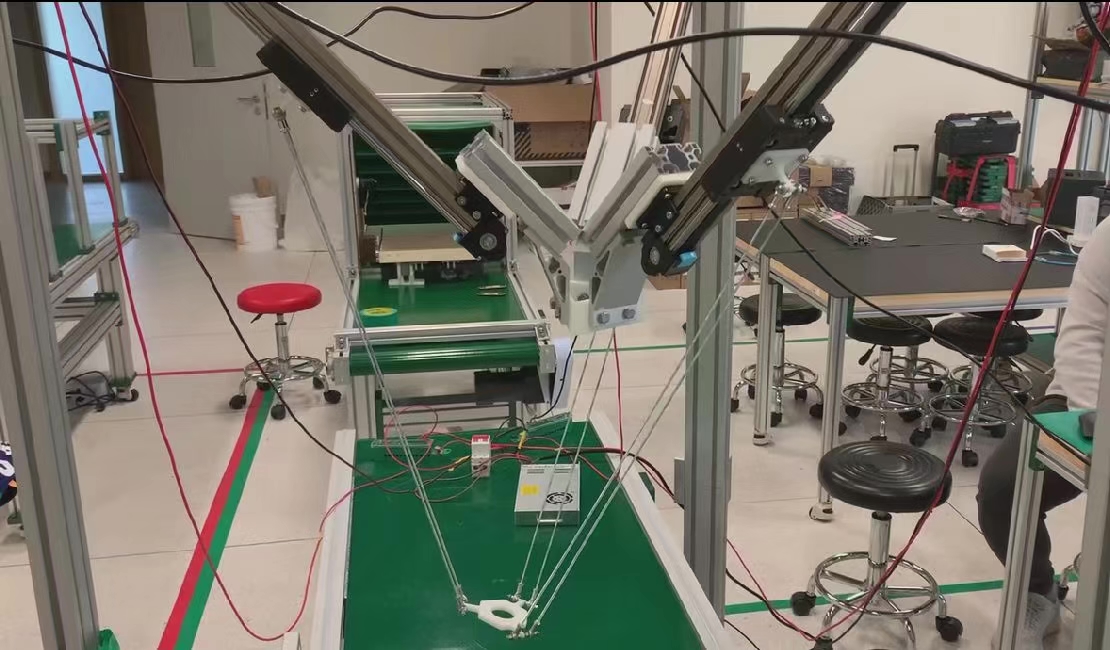
3-DoF Delta Robot
Coursework
Undergraduate Level (@ SUSTech)
C/C++ Program Design
Engineering Mechanics - Statics and Dynamics
Signals and Systems
Fundamentals of Control Engineering
Fundamentals of Mechanical Design
Robot Operating System
Robot Modeling and Control
Modern Control and Estimation
Embedded System and Robotics
Fundamentals of Engineering Optimization
Advanced Actuation for Robotics
Machine Learning for Engineering
Graduate Level (@ ETH Zürich)
Completed
Linear System Theory
Introduction to Machine Learning
Model Predictive Control
Planning and Decision Making for Autonomous Robot
Computer Vision
Computational Control
Recursive Estimation